Running Biomechanics - Physiopedia

bimor

Orientation of the thigh with filtered gyroscope-X axis reading when

Joints kinematics of the simulated bipedal robot.

Voluntary changes in step width and step length during human walking affect dynamic margins of stability. - Abstract - Europe PMC
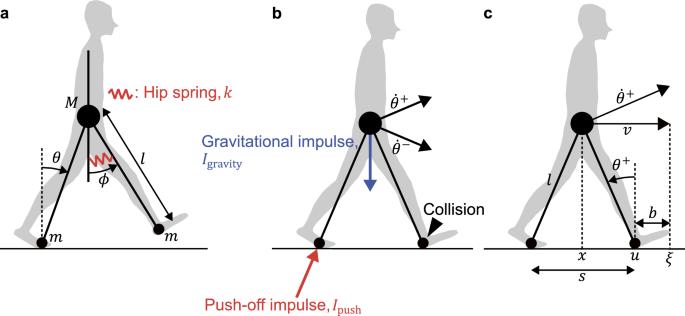
A powered simple walking model explains the decline in propulsive

Altering Compliance of a Load Carriage Device in the Medial

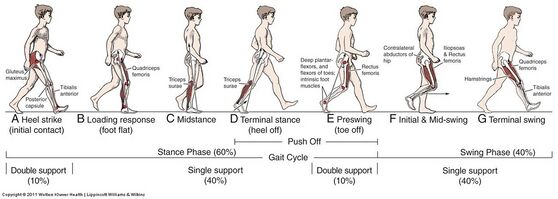
Muscle Activity During Gait - Physiopedia

教員紹介

The areas under the receiver operating characteristic curves for
Gait: Antalgic - Physiopedia
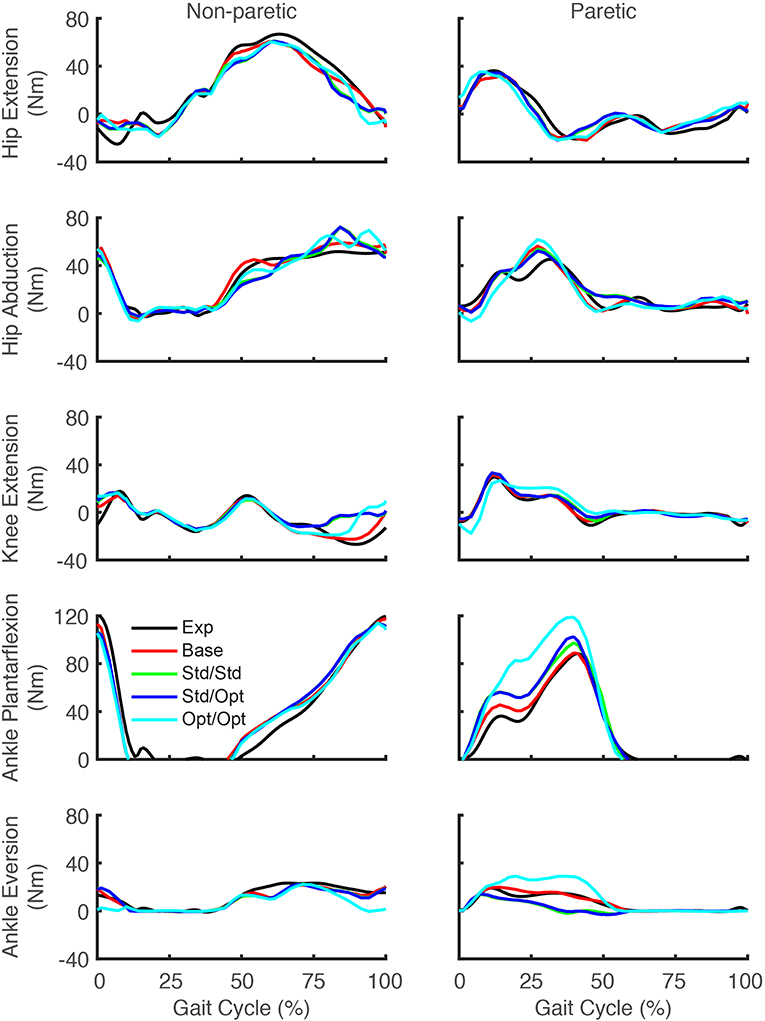
Frontiers Computational Design of FastFES Treatment to Improve Propulsive Force Symmetry During Post-stroke Gait: A Feasibility Study

Effects of Foot–Floor Friction on Trip-Induced Falls During Shuffling Gait: A Simulation Study

bimor